 da
da en
en es
es fr
fr it
it nb
nb nl
nl pt
pt sv
sv fi
fi- Startseite
- Neuigkeiten
- Drehzahlsensoren und Sensorringe: alles, was Sie wissen sollten
Drehzahlsensoren und Sensorringe: alles, was Sie wissen sollten
Wir haben uns inzwischen daran gewöhnt, dass sich die Drehzahlsensoren rundum das Radlager befinden; das war aber lange nicht immer so. Bevor ABS auf den Markt kam, wurde die Drehzahl häufig direkt über das Getriebe oder das Differenzial gemessen. Später wurden die Sensoren über die Antriebsachsen zu den Radlagern verlagert. Im Laufe der Jahre wurden zahlreiche Varianten entwickelt. Wir werden diese Varianten und ihre Eigenschaften daher im Folgenden einzeln behandeln.
Verschiedene Arten von Sensorringen
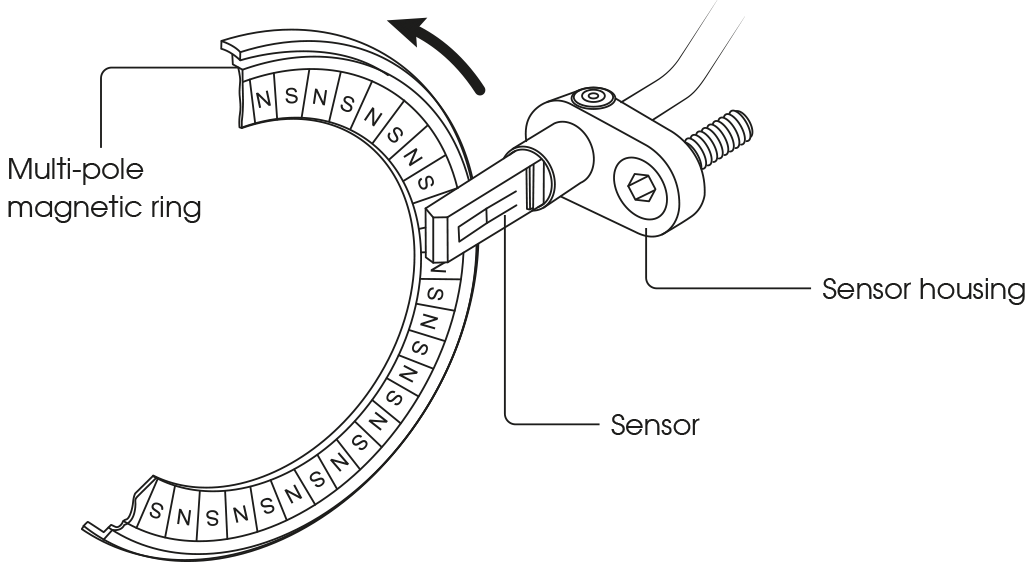
Im ABS-System werden Sensorringe verwendet, so dass der Drehzahlsensor die Drehung messen kann. Diese Ringe haben Zähne aus Metall oder wechselnde magnetische Pole, mit denen sie ein Signal erzeugen können.
Da ein Zahnradring jedoch auch einige Nachteile hatte (Gewicht, Störungen durch Verschmutzungen und Schäden) und weil im Laufe der Zeit durch die Weiterentwicklung mehr Präzision und Funktionalität erwünscht waren, wurde zu einem magnetischen Ring direkt auf dem Radlager übergegangen. Der Ring ist so gut in den Entwurf integriert, dass am Radlager heute nicht mehr zu erkennen ist, ob dieses über eine ABS-Funktion verfügt.
Dadurch, dass sich der Magnetismus jetzt vom Sensor zum Sensorring verschoben hat, entstanden darüber hinaus Möglichkeiten für eine Weiterentwicklung des Drehzahlsensors. Darauf gehen wir auf den nächsten Seiten näher ein.
Ein Teil in ihrem Auto ist defekt?
Starten Sie noch heute Ihren Reparatur-Auftrag.

Durch Verschmutzungen oder Beschädigungen der Sensorringe kann das Signal abweichen, was zu ungewöhnlichen Störungen führen kann. Wir empfehlen Ihnen dringend, bei jeder Störung zuerst die Sensorringe gründlich zu kontrollieren!
Passive Sensoren (DF6)
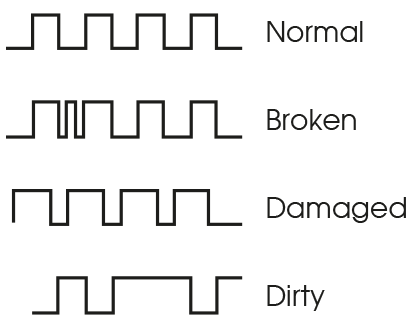
Bis etwa zum Jahr 2003 wurden Fahrzeuge vor allem mit passiven Radsensoren ausgerüstet, die auch als DF6-Sensoren bezeichnet werden. Bei diesem Sensortyp werden praktisch immer Sensor-Zahnräder aus Metall verwendet. Der Sensor selbst besteht aus einem mit einer Spule umwickelten Dauermagneten.
Wenn sich das Rad dreht, erzeugen die Zähne des Sensorrings ein variables Magnetfeld, das in der Spule eine sich ständig ändernde Spannung generiert: Dadurch wird ein sinusförmiges analoges Spannungssignal an das ABS-Steuergerät (ECU) gesendet. Je höher die Drehzahl, desto höher ist auch die Amplitude des Signals. Bei einer sehr kleinen Drehzahl ist die Amplitude jedoch so niedrig, dass das ABS-Steuergerät kein Signal erfasst. Es kann davon ausgegangen werden, dass das Signal erst ab etwa 30 km/h stark genug ist, um erfasst zu werden.
Sowohl den passiven Sensor als auch das Zahnrad können Sie relativ einfach selbst überprüfen. Viele Diagnosegeräte können Live-Daten zur Raddrehzahl anzeigen. Wenn Sie nicht über solche Diagnosegeräte verfügen, ist die Überprüfung auch mit einem Oszilloskop möglich. Sie können das Signal des Sensors kontrollieren, indem Sie das Signalkabel des Sensors an das Oszilloskop anschließen. Drehen Sie dann am Rad; daraufhin sollte ein sinusförmiges Signal angezeigt werden (meistens zwischen 0,5 V und 1,0 V). Achten Sie gut auf eventuelle Abweichungen beim Signal; diese werden durch Beschädigungen an einem oder mehreren Zähnen verursacht. Wenn Sie lediglich den Sensor überprüfen möchten, bewegen Sie mehrere Male schnell einen Schraubendreher aus Metall am Sensor vorbei. Obwohl die Form des Signals nicht sehr aussagekräftig ist, können Sie auf diese Weise kontrollieren, ob der Sensor überhaupt reagiert.
Aktive Sensoren (DF10)
Seit dem Jahr 2003 setzen viele Automobilhersteller aktive Radsensoren ein. Unter Fachleuten wird die erste Version dieser aktiven Sensoren als DF10-Sensor bezeichnet. Dieser Sensortyp bietet eine viel bessere Genauigkeit und funktioniert unabhängig von der Drehzahl: Jeder Impuls erzeugt die gleiche Signalamplitude; dadurch kann jede Drehzahl (und sogar Stillstand) gemessen werden. Dieses Signal wird auch als Rechtecksignal bezeichnet.

Obwohl DF10-Sensoren bereits viele Vorteile gegenüber den älteren DF6-Standardsensoren haben, wurden bei diesen Sensoren anfänglich noch Zahnräder verwendet. Daher verfügten diese Sensoren im Inneren auch noch über einen Magneten, mit dem sie selbst ein Magnetfeld erzeugen konnten. Ab 2006 kamen immer mehr Systeme auf den Markt, bei denen ein Magnetring verwendet wurde. Diese Sensoren benötigen daher im Inneren auch keinen Magneten mehr.
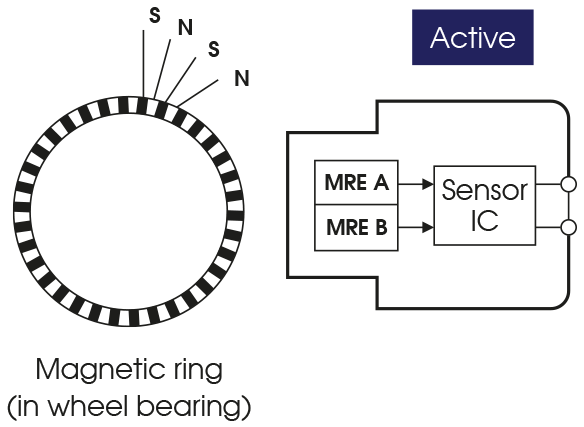
DF10-Sensoren müssen mit Spannung versorgt werden; daher werden diese Sensoren auch aktive Sensoren genannt. Aus diesem Grund sind bei einem aktiven Sensor zwei Kabel vorhanden: ein Kabel für die Spannungsversorgung (häufig 12 V, aber auch 5 V kommt gelegentlich vor) und ein zweites als Massekabel. Die Signalausgabe zum ABS-Steuergerät (ECU) erfolgt über eines dieser Kabel: Welches Kabel verwendet wird, ist bei jedem Fahrzeug anders. Im Sensor befindet sich ein Halbleiter, der auch als magnetoresistives Element (MRE) bezeichnet wird und sowohl als Leiter als auch als Isolator fungieren kann. Wenn der Sensorring gedreht wird, schaltet der Halbleiter die Ausgabe abwechselnd ein bzw. aus. Dadurch wird eine digitale Rechteckwelle erzeugt, die an das ABS-Steuergerät gesendet wird. Dieses Signal kann mit einem Oszilloskop genauer betrachtet werden.
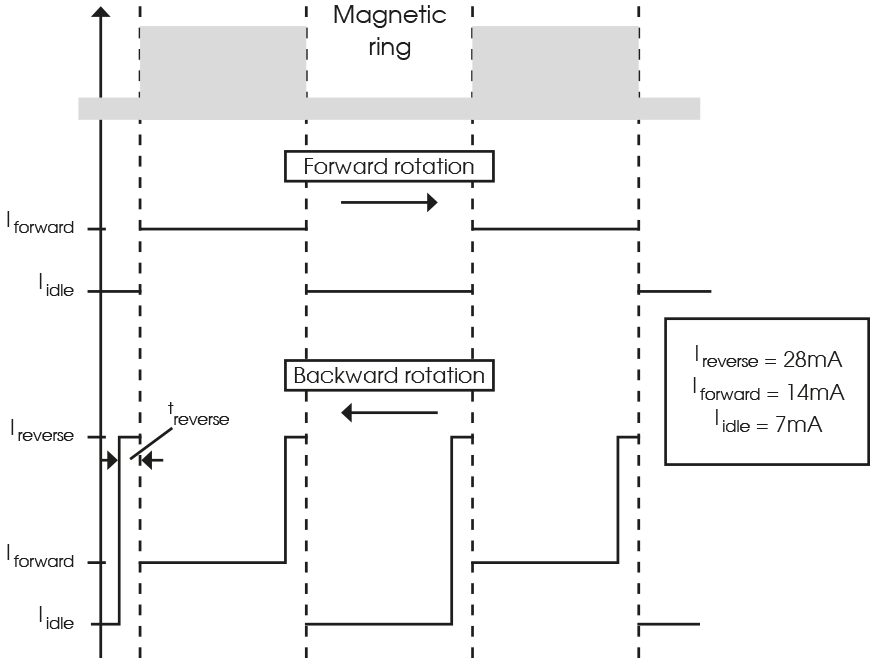
Praktische Werte für die Diagnose:
Rechtecksignal einen festen Wert von 7 mA, 14 mA oder 28 mA. (Sehe Diagram). Eine willkommene Ergänzung zur bestehenden Funktion war das Sichtbarmachen der Rückwärtsbewegung. Daher wurde der DF10-RotDir entwickelt. Dieser Sensor ist in der Lage, neben dem standardmäßigen Rechtecksignal noch ein zusätzliches Signal zu senden, wenn rückwärts gefahren wird.
Mehr intelligente Funktionen (DF11i)
Durch die intensive Nutzung von CAN und anderen Kommunikationssystemen an anderen Stellen im Fahrzeug, hat man erkannt, dass ein Signal von einem Drehzahlsensor viel mehr Informationen vermitteln kann als nur die Drehzahl selbst. Neben der Angabe der Drehrichtung, für die mit dem DF10-RotDir bereits eine gute Lösung geboten wurde, konnte zum Beispiel auch eine zusätzliche Kontrolle des verfügbaren magnetischen Felds in das Signal eingebaut werden.
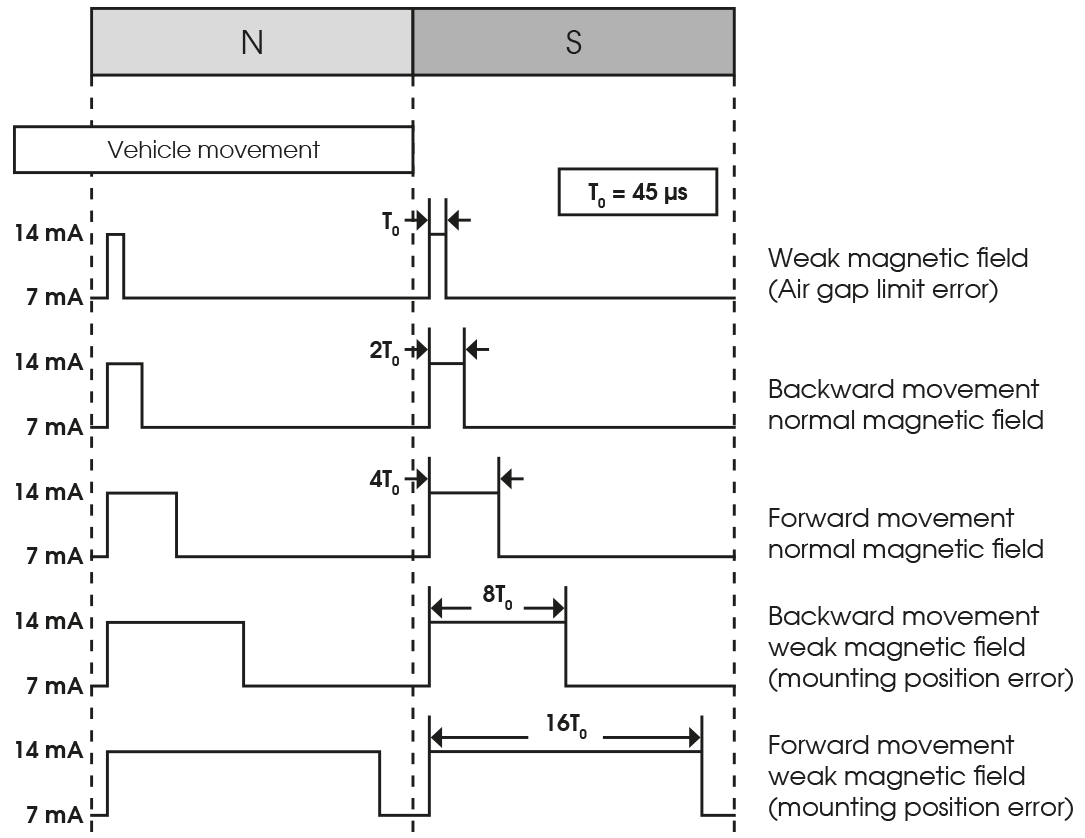
Um dies zu ermöglichen, musste der Drehzahlsensor daher verschiedene Signale für verschiedene Situationen erzeugen können. Daher entschied man sich für PWM: Pulsweitenmodulation (Pulse Width Modulation). Das Prinzip dieses Protokolls ist eigentlich ganz einfach: Es wird eine Standardlänge für den Impuls festgelegt (bei dem DF11i ist das üblicherweise 45 μs) und indem dieser Impuls um einen Faktor 2, 4, 8 oder 16 verlängert wird, empfängt die ABS-ECU mehr Informationen als nur das eigentliche Pulsmoment. Die folgende schematische Darstellung macht das Prinzip wahrscheinlich noch etwas deutlicher:
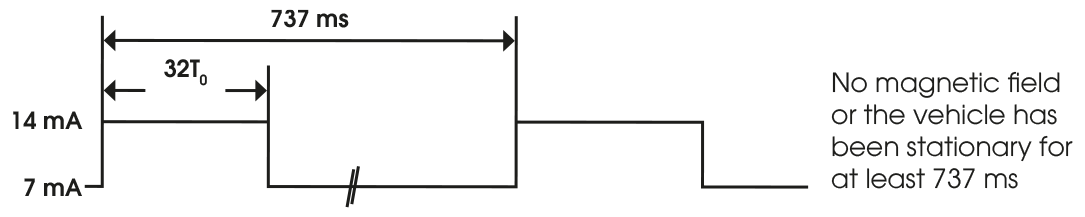
Darüber hinaus wurde bei DF11i-Sensoren eine weitere intelligente Funktion „programmiert“: der Unterschied zwischen einer Null-Drehzahl und einem nicht-funktionierenden Sensor. Wenn das Fahrzeug stillsteht, sendet ein DF11i noch immer in periodischen Abständen einen Puls an das ABS-Steuergerät (ECU), um damit anzuzeigen, dass der Sensor noch in Betrieb ist. Das geschieht normalerweise alle 737 ms mit einem Puls, der um einen Faktor 32 verlängert ist.
Interessantes Hintergrundwissen:
Vielleicht ist Ihnen das noch gar nicht aufgefallen, aber ist es nicht komisch, dass alle diese Typen mit den Buchstaben „DF“ beginnen? Das liegt daran, dass kluge Köpfe der Bosch GmbH in Deutschland an der Wiege dieser modernen Sensortechnologie standen: „DF“ steht für „Drehzahlfühler“.
Vom DF11i wurde sogar noch eine Version mit einem internen Magneten hergestellt, so dass dieser (genau wie einige Versionen des DF10) auch mit älteren Ausführungen mit Zahnrad verwendet werden kann. Dieser Typ wird als DF11iM bezeichnet.
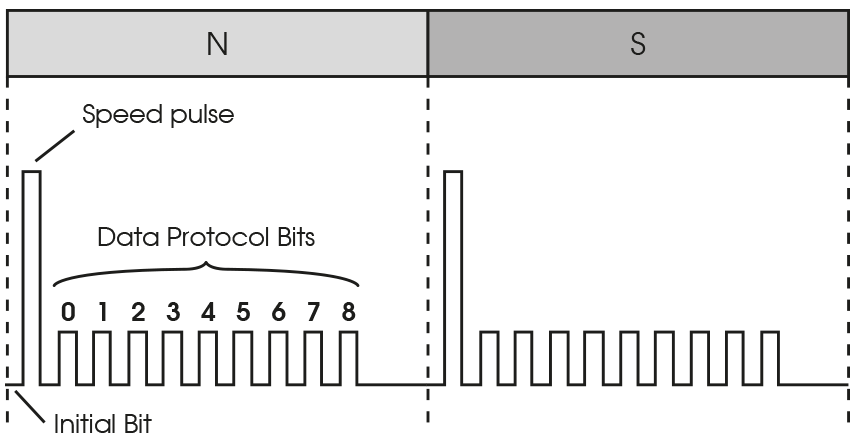
Der neue Standard (VDA)
Durch Entwicklungen wie die „PSI5“-Schnittstelle unter anderem für das Airbagsystem war auch beim Drehzahlsensor ein nächster Schritt möglich. Bei einem VDA-Sensor gehört das Senden von 1 Puls definitiv der Vergangenheit an. Stattdessen generiert dieser Sensor einen Puls und eine darauffolgende aus 9 Bits bestehende Nachricht; dabei ist die Puls-Amplitude 2x so hoch wie die Bit-Amplitude. So wird es nicht nur möglich, sehr spezifische Informationen zu senden, der Sensor wird dadurch auch programmierbar. Das dafür verwendete Protokoll ist das „AK-Protokoll“. Es ist bekannt, dass bestimmte Sensoren von Infineon nach dem AK-Protokoll 4.0 arbeiten, das im Februar 2008 von der Daimler AG herausgegeben wurde; inzwischen werden jedoch auch bereits neuere Varianten verwendet.
Sie sind jetzt wahrscheinlich neugierig nach der Funktion dieser 9 Bits; leider können wir diese Neugier nur teilweise stillen. Die meisten Bits sind nämlich frei programmierbar und dadurch kann die Funktion bei jeder Automarke und sogar bei jedem Modell anders sein.
Verwenden Sie beim Ersetzen immer Originalradsensoren!
ACTRONICS empfiehlt immer die Auswahl von OEM beim Ersetzen der Radsensoren. Diese Sensoren müssen nach Chassis -Nummer ausgewählt werden, da viele verschiedene Typen verfügbar sind, die alle außen gleich aussehen. Das ECU gibt dann normalerweise Fehlercodes an, die sich auf die "Impedanz" des Radsensors beziehen.
Kontamination, Schäden und Rückschläge bei Radlagern
Überprüfen Sie im Falle von Radsensor -Beschwerden immer die Radlager auf Kontamination, Beschädigung und Gegenreaktion. Das Signal, dass der Ring erzeugen muss, hat eine geringe Toleranz und eine kleine Abweichung kann daher sofort zu einer Fehlfunktion führen.
Radsensoren selbst messen
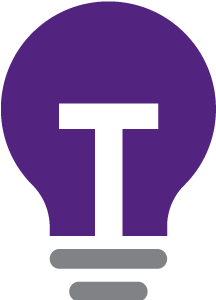
Alle diese Arten von Radsensoren können Sie glücklicherweise noch immer selbst mit einem Oszilloskop prüfen. Indem Sie das Rad kräftig anstoßen, während die Zündung eingeschaltet ist (das ist wichtig!), können Sie relativ einfach beurteilen, ob die Sensoren und Sensorringe noch ordnungsgemäß funktionieren. Die Verwendung eines Schraubendrehers aus Metall (=Zahnrad) oder eines magnetischen Schraubendrehers (=Magnetring) kann natürlich auch Deutlichkeit geben. Eine korrekte Beurteilung des abgegebenen Signals ist dabei jedoch von großer Bedeutung. Verwenden Sie daher immer ein Beispielsignal, um gut vergleichen zu können. Um die Unterschiede zwischen diesen Signalen noch etwas mehr zu verdeutlichen, haben wir eine kurze Zusammenfassung für Sie zusammengestellt:
DF6
Ein Sinussignal, in den meisten Fällen zwischen 0,5 V und 1,0 V. Die Amplitude wird höher, wenn sich das Rad schneller dreht.
DF10
Ein Rechtecksignal mit einer festen Amplitude von 7 mA, 14 mA oder 28 mA. Die Frequenz der Rechtecksignale nimmt zu, wenn sich das Rad schneller dreht. Typen mit RotDir-Funktion generieren beim Rückwärtsfahren ein zweistufiges Rechtecksignal.
DF11i
Ein PWM-Signal mit einer Signallänge von 45 μs. Wenn sich das Rad vorwärts dreht, wird dieses Signal um einen Faktor 4 verlängert; ein „Block“ des Rechtecksignals muss dann 180 μs lang sein. Wenn das Rad rückwärts gedreht wird, wird das Rechtecksignal um einen Faktor 8 verlängert, es ist dann 360 μs lang. Wenn das Rad still steht, generiert der Sensor alle 737 ms ein Rechtecksignal mit einer Länge von 1440 μs (32x Signallänge). Es ist daher immer ein Signal messbar.
VDA
Ein VDA-Sensor generiert beim Drehen des Rads einen Drehzahlimpuls, gefolgt durch ein Signal mit 9 Bits. In diesem Signal können Faktoren wie die Drehrichtung mitgesendet werden. Auch wenn sich das Rad nicht dreht, wird dieses Signal gesendet, dann jedoch ohne Drehzahlimpuls. Es ist daher immer ein Signal messbar.